

One of the most critical decisions in successful robotic automation is selecting the appropriate end effector or end-of-arm tooling (EOAT). This decision is key in overall system performance.
Many factors in sound EOAT decisions are:
The flexibility to adapt to production and packaging requirements is a key advantage of robotic equipment and systems.
The first step is to understand the application and determine whether the robot will be handling tools or material. Material handling has to use grippers and clamps. If the work pieces are unusually large or the number of allowable grippers is restricted (due to work cell configuration, for instance), mechanical and vacuum clamps are preferable. Unlike clamps, which have only one moving arm, grippers have two moving fingers. Some manufacturers supply software for sizing grippers, linear slides, and rotary actuators. EOA designers take multiple factors into consideration such as working pressures, payloads, speeds, tooling lengths, et cetera. The software assists in making the proper selection and eliminates risk of errors. The farther a robot has to reach, the more critical the weight of the EOA tooling. Overloaded arms tend to sag when static, and wiggle when coming to a stop. Robotic work cells are compact. This minimizes material handling and transfers that are big factors in cycle times. This puts a premium on compact EOA tooling: the more compact, the fewer potential collisions to worry about. Tooling must also be tough and durable.
Over the last 15 years Magnum Systems has become a leader in efficient programming and application of robotic automation and has utilized multiple end of arm tooling designs as well as brought to market our very own tooling products for multiple bag types and containers.

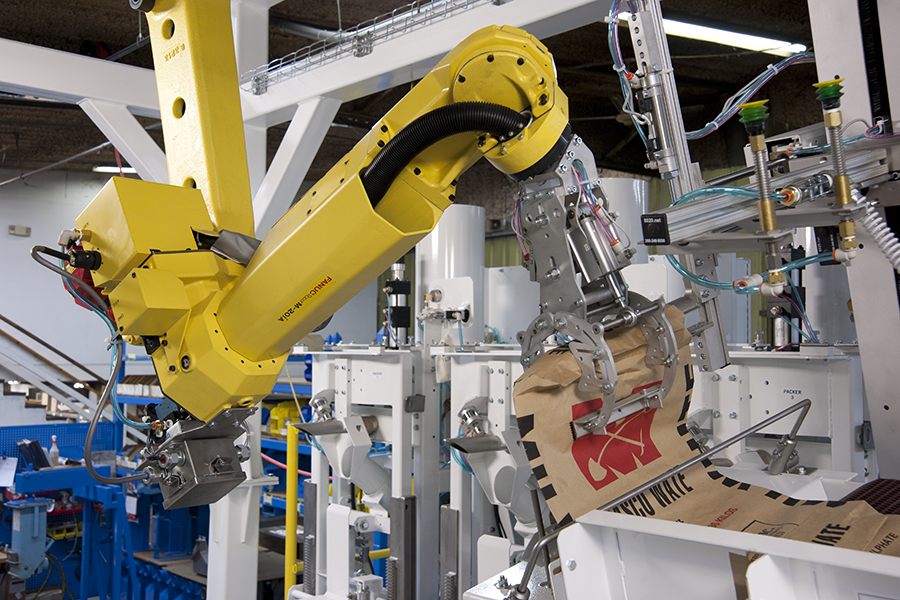
Magnum Systems Model TRV1000 Robotic Valve Bag Placer was released in 2004 with both a vacuum suction and clamp gripper type end effector depending on the bag magazine set up and use or non-use of automation quality bags. The suction bag placer version features two suction cups for a positive grip on the valve bag, with integral bag pre-opener and is used with a vertical drawer type bag magazine. Efficient operation is achieved by proof of position sensors and programing to pick each bag from the various drawers, open and then place on one or two spouts of valve bag fillers. When utilizing this style of placer it is extremely important to use automation quality bags. We are aware that non automation quality bags will probably save you money but the chances for miss placed bags and damage to bags highly increases when low quality bags are used in robotic automation. So in the event your plant wants to use non automation quality bags or the layout of your building allows for a horizontal bag magazine that can index stacks of bags, we have a clamp grip style EOAT. The bag pre-opener is installed on the bag magazine. The pre-opener still features two vacuum suction grippers just like the other model but robot arm tooling features our clamp grip to grab the bag after it has been prepped for placement.
Magnum Systems has provided robotic palletizing systems since 2005 with our model TRP3000 palletizer. Often modifying end effector tooling to fit our customer needs, we determined it was time for us to produce our own bag palletizing EOAT. Last year in 2017 we introduced our Model MRPT end effector.

In less than four seconds, the MRPT can change bag handling size on the fly to allow two different width bags to be palletized with the same robotic arm on two or more packaging lines. The MRPT uses discrete I/O from the robot, or PLC, to initiate each movement necessary to pick the bags from a picking conveyor and place them on a pallet per unit load setup. The MRPT also features linear bag squaring, proof of position sensors, with options for slip sheet placement and pallet hooks.
Magnum Systems can assist customers in all aspects of EOAT selection and application. We can also help improve and optimize old systems to meet certain standards. The more adaptable the EOAT is the more beneficial it is to the system.
Related Post
Customized Nuisance Dust Collection and Control in Pneumatic Conveying Systems
11 Pneumatic System Considerations for the Chemical Industry
Choosing the Right Bulk Bag Filling Equipment in the Chemical Industry
Using Robotics to Overcome Manual Palletizing System Challenges